


发明内容本实用新型的目的是提供一种起升控制系统用液压推动器接触器,实现更好地提 高桥式吊车起升机构的制动器控制系统的安全性,降低制动器故障率。 为解决上述技术问题,本实用新型的技术方案是 起升控制系统用液压推动器接触器,其特征在于,在液压推动器的动力回路上,采
用串联方式设置两套接触器触点。 所述的接触器线圈在控制回路中并联。 与现有技术相比,本实用新型的有益效果是有效地避免了由于接触器主触点粘 连或机械部分卡阻,接触器不能及时断开,使液压推动器无法得到控制的现象发生,提高桥 式吊车起升机构制动器电气控制系统的安全性,降低了制动器的故障率,取得了可观的经 济效益,使用效果良好。
具体实施方式
—种龙门吊夹轨器,如图1 图5所示,包括底板2、夹臂3、挡杆1、夹紧螺栓4和 转轴5,底板2固定在龙门吊底部靠近轨道6的位置,底板2上端设有挡杆1 ,底板2下端设 有转轴5,夹臂3底端与转轴5连接,两个夹臂3之间通过夹紧螺栓4连接。夹臂3头部内 侧设有凹槽,凹槽的位置与轨道6侧面的位置相对应,夹臂3头部至凹槽底边的长度小 于轨道6凹陷处的高度。 龙门吊车在行进时,本实用新型呈收起状态,如图1、图2所示,夹臂3通过其上方 的挡杆1卡紧而不能落下。当龙门吊车停止运动并需要用本实用新型固定时,将挡杆1和 夹紧螺栓4卸下,如图3所示,由于没有了挡杆1的阻挡,夹臂3绕转轴5落下,夹臂3头部 的凹槽卡在轨道6沿上,如图4、图5所示,用夹紧螺栓4将两个夹臂3固定住,龙门吊车被 紧固在轨道6上。
权利要求一种龙门吊夹轨器,其特征在于,包括底板、夹臂、挡杆、夹紧螺栓和转轴,底板固定在龙门吊底部靠近轨道的位置,底板上端设有挡杆,底板下端设有转轴,夹臂底端与转轴连接,夹臂头部内侧设有凹槽,两个夹臂之间通过夹紧螺栓连接。
2. 根据权利要求1所述的龙门吊夹轨器,其特征在于,所述的凹槽的位置与轨道侧面 的位置相对应,夹臂头部至凹槽底边的长度小于轨道凹陷处的高度。
专利摘要本实用新型涉及一种龙门吊夹轨器,包括底板、夹臂、挡杆、夹紧螺栓和转轴,底板固定在龙门吊底部靠近轨道的位置,底板上端设有挡杆,底板下端设有转轴,夹臂底端与转轴连接,夹臂头部内侧设有凹槽,两个夹臂之间通过夹紧螺栓连接。该装置结构简单,操作简便,准确有效的固定龙门吊车体,保障了设备和工作人员的安全。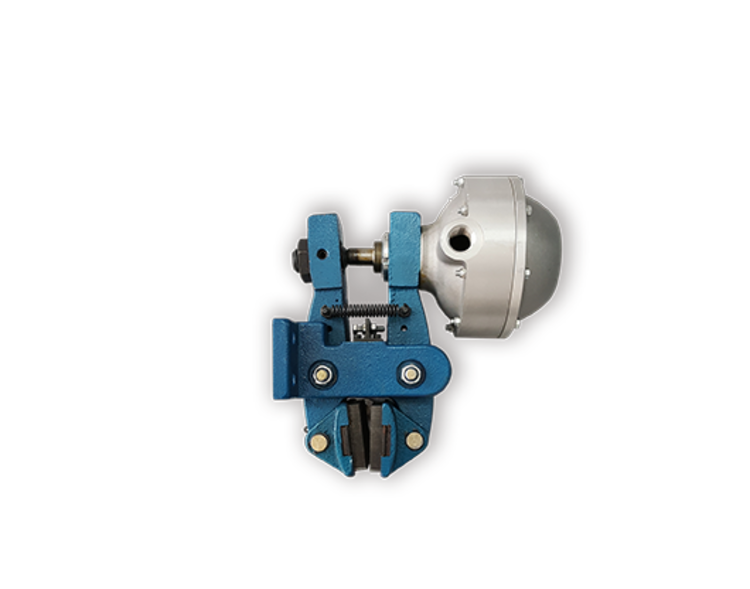
电磁抱闸制动的特点:
机械制动主要采用电磁抱闸、电磁离合器制动,两者都是利用电磁线圈通电后产生磁场,使静铁芯产生足够大的吸力吸合衔铁或动铁芯(电磁离合器的动铁芯被吸合,动、静摩擦片分开),克服弹簧的拉力而满足工作现场的要求。
电磁抱闸是靠闸瓦的摩擦片制动闸轮.电磁离合器是利用动、静摩擦片之间足够大的摩擦力使电动机断电后立即制动。
优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。它安全可靠,不会因突然断电而发生事故
抱闸制动器电气工作原理?
液压抱闸制动器,正常情况下是抱死电机抱闸轮的,它是一个三相380V的小电机,当电机要工作时,通过接触器,如不是起动电机或变频电机,工作电源可与电机并联,给抱闸电机供电,电机旋转带动叶轮,叶轮通过液压油,推动液压杆,将抱闸打开。
电磁抱闸,它是在电机工作时,另外给它一个直流电源到抱闸线圈,当抱闸线圈有电流时产生电磁吸合衔铁,打开抱闸装置。
抱闸制动器电气工作原理是什么
抱闸制动器电气工作原理是:用电磁力对运动机械实施制动。当旋转机械或直线机械运转时,电磁抱闸在弹簧力的作用下松开,机械可以运转,当需要将机械停止运行时,给抱闸电磁线圈通入电流,使得线圈产生的磁场将制动铁芯磁化,在铁芯的开口部位产生电磁力,使铁芯吸合,带动抱闸实施制动。
电磁抱闸制动的结构和工作原理是怎样的,怎样进行调整
通常电磁抱闸设置在电机的联轴器附近,电机停止期间电磁抱闸由弹簧*压紧,电机轴处于锁状态。开启电磁抱闸靠电磁线圈的磁力,并且电磁线圈和电机同步通电和停止。



焦作制动器厂气动液压盘式制动器,行车电力液压推动器
更新时间:2024-03-30 02:22:20




收藏
举报
价格
¥988
起批量
≥ 1件
供应商
焦作制动器股份有限公司
所在地
河南焦作市制动器工业园区